基本资料
李秦川 教授,博士,博导,亚博取款曝顾秒到账院长,国家级领军人才 ,国务院特殊津贴专家,全国五一劳动奖章获得者,浙江省151人才工程重点层次。担任中国机械工程学会机器人分会常务委员、中国自动化学会共融机器人专业委员会委员、机械工程学报英文版编委、浙江省人形机器人协同创新中心主任。主持国家和省部级科研项目十余项,发表论文百余篇,出版专著3部。指导学生获得上银优秀机械博士论文奖优秀奖并入选中国科协青年托举人才工程;带领学生荣获挑战杯国赛特等奖,中国研究生机器人创新设计大赛特等奖、中国研究生智慧城市技术与创意设计大赛一等奖等;辅导学生获批国家级大学生创新创业项目、新苗人才项目等。
,国务院特殊津贴专家,全国五一劳动奖章获得者,浙江省151人才工程重点层次。担任中国机械工程学会机器人分会常务委员、中国自动化学会共融机器人专业委员会委员、机械工程学报英文版编委、浙江省人形机器人协同创新中心主任。主持国家和省部级科研项目十余项,发表论文百余篇,出版专著3部。指导学生获得上银优秀机械博士论文奖优秀奖并入选中国科协青年托举人才工程;带领学生荣获挑战杯国赛特等奖,中国研究生机器人创新设计大赛特等奖、中国研究生智慧城市技术与创意设计大赛一等奖等;辅导学生获批国家级大学生创新创业项目、新苗人才项目等。
立足工程化应用需求,基于几何代数的框架下,开展并联机器人构型综合研究。
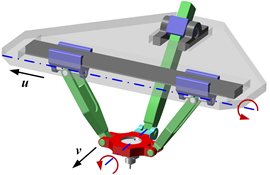
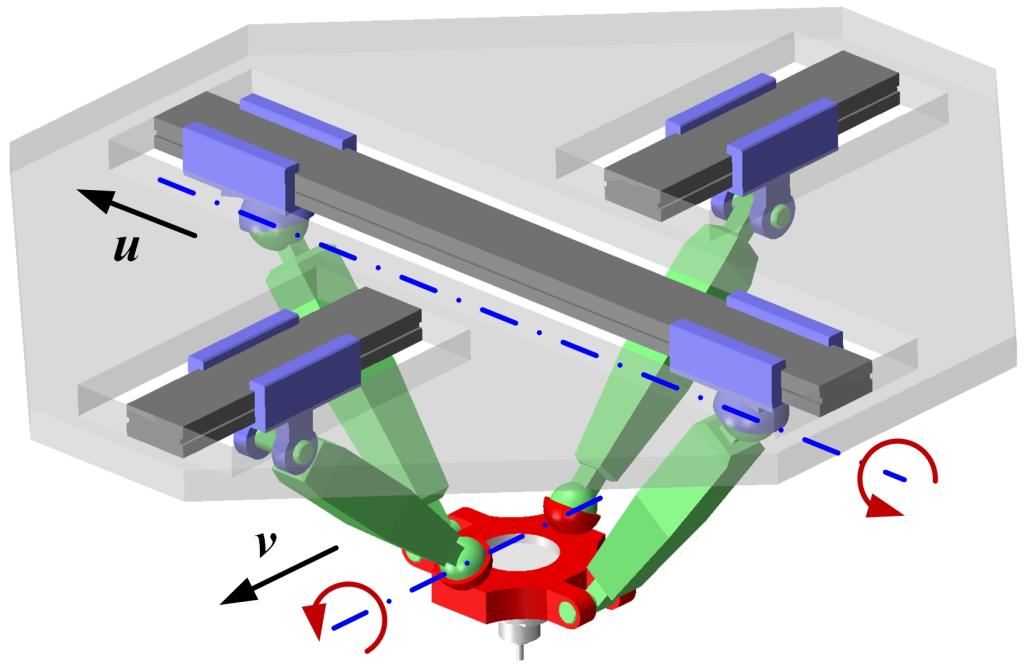
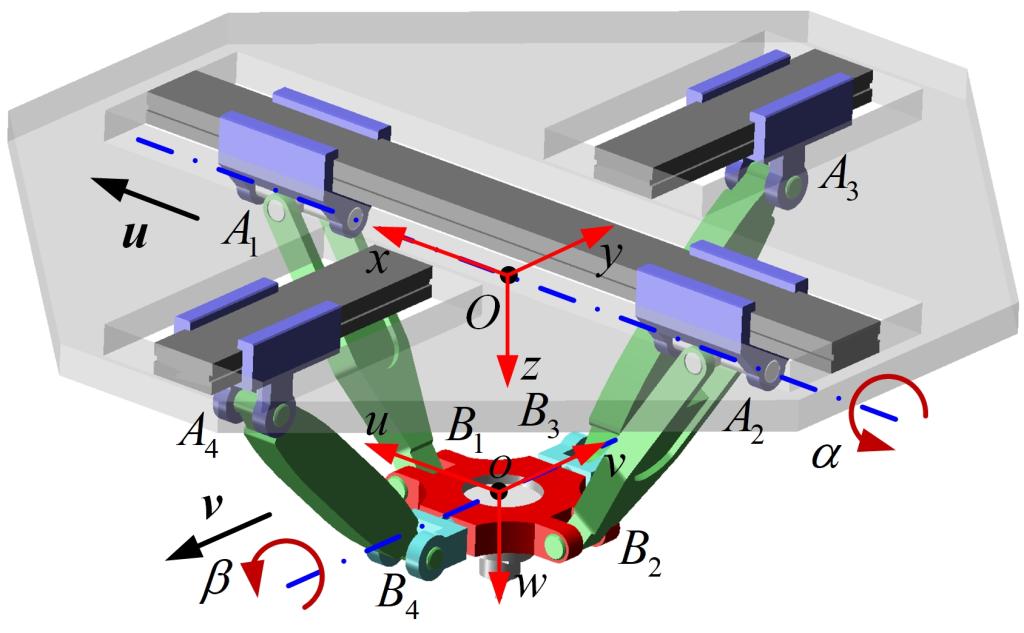
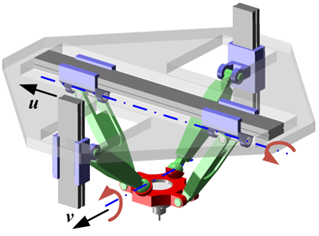
2R1T并联机构
● 机器人化制造装备
面向国家高端装备制造业重大战略需求,针对航空、航天、汽车等领域复杂构件精密加工,开展新型机器人化装备的设计与研发工作。主要研究内容包括:尺寸参数优化、拓扑结构设计、运动学标定、刚柔耦合动力学建模、轨迹规划、轨迹跟踪控制和加工等。


五轴混联加工机器人


超冗余臂
● 机器人操作技能学习与泛化
针对机器人操作面临的多模态交互低效、技能迁移适应性不足及协同操作精度缺失等核心难题。开展研究内容主要有:多模态人机交互系统设计、基于遥操作的技能学习与泛化、双臂遥操作力反馈控制研究。

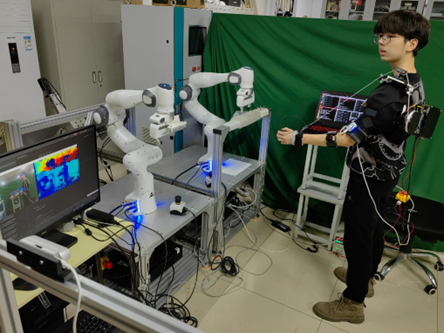
遥操作机器人
● 足式/人形机器人
面向足式机器人在非结构化复杂地形环境下的自主运动能力所面临的多重技术瓶颈。主要研究内容有:人形机器人构型设计及尺度优化、同步定位与建图人形机器人动态运动规划与平衡控制,复杂环境智能感知,基于多传感器融合的同步定位与建图,基于模仿学习的机器人自主运动规划等。


足式机器人
获奖情况
1. 全国五一劳动奖章,国家级,排名1,2021
2. 浙江省劳模工匠创新工作室,省部级,排名1,2023
3. 中国纺织工业联合会教学成果奖一等奖,排名1,2023
4. 浙江省优秀教师,省部级,排名1,2016
5. 国家教学成果一等奖,国家级,排名4,2023
6. 浙江省自然科学二等奖,省部级,排名1,2018
科研项目
1. 国家杰出青年科学基金,机器人机构学,350万,2016.01-2020.12,排名1
2. 国家自然科学基金联合基金重点项目,大型变曲率结构件编织机器人装备设计理论与方法,253万,2024.01-2027.12,排名1
3. 国家自然科学基金重点项目,大型航空结构件高效加工并联机器人设计理论与方法,300万,2020.01-2024.12,排名1
4. 浙江省级重点研发计划,遥操作医疗机器人技能学习与泛化关键技术研发,150万,2021.01.01-2023.12.31,排名1
5. 浙江省自然科学基金重大项目,人形机器人拟人化运动的学习方法与控制策略,100万,2025.01.01-2027.12.31,排名1
1. Li Qinchuan, Jacques M. Herve, Ye Wei. Geometric Method for Type Synthesis of Parallel Manipulators. Springer.2019.07
2. 李秦川,柴馨雪,姚辉晶.并联机构自由度计算与奇异分析的几何代数方法.科学出版社.2019.09
论文:
3. Wang F, Li Q*, Park Jong-Oh*, Zheng Shaohui, Choi Eunpyo. Ultralow Voltage High-Performance Bioartificial Muscles Based on Ionically Crosslinked Polypyrrole-Coated Functional Carboxylated Bacterial Cellulose for Soft Robots. Advanced Functional Materials. 2021,31(13): 2007749.
4. Ye W, Zhang B, Li Q*. Design of a 1R1T planar mechanism with remote center of motion. Mechanism And Machine Theory. 2020,149: 103845.
5. 徐灵敏,叶伟,李秦川*.并联机器人逆动力学建模的几何代数方法[J].机械工程学报,2022,58(07):1-11.
6. Jin X, Jiang X, Li Q*. Interval-analysis-based determination of the trajectory-reachable workspace of planar cable-suspended parallel robots. Mechanism and Machine Theory, 2022, 177: 105060.
7. Jin X, Ye W, Li Q*. New indices for performance evaluation of cable-driven parallel robots: Motion/force transmissibility. Mechanism and Machine Theory, 2023, 188: 105402.
8. Jin X, Zhang H, Wang L, Li Q*. Review on Control Strategies for Cable-Driven Parallel Robots with Model Uncertainties. Chinese Journal of Mechanical Engineering, 2024, 37(1): 17.
9. Zhang H, Ye W, Li Q*. Robust Decoupling Control of a Parallel Kinematic Machine Using the Time-Delay Estimation Technique[J]. Science China Technological Sciences, 2023, 66, 1916–1927.
10. Zhang H, Zhao H, Miao Y, Li Q*, Super-Twisting Sliding Mode- and Iterative Learning-Based Synchronization Control for 2R1T Parallel Robots, IEEE/ASME Transactions on Mechatronics, 2025.
11. Shi D, Hu H, Yang C, Lu Z, Li Q*, “A Learning System for Deformable Object Cooperative Manipulation,” IEEE Trans. Automat. Sci. Eng, 2024.
专利情况
1. 李秦川,陈汉成,叶伟.一种部分解耦的两转动两移动并联机构: CN201911217094.7 [P]. CN110962113B.发明专利,授权
2. 徐灵敏,李秦川,叶伟.一种驱动固定的两转动一移动弧形导轨并联机构: CN201811092419.9[P]. CN109227519B.发明专利,授权
3. 李秦川,何其臻,叶伟,陈巧红.一种三分支6+3自由度运动冗余并联机构: CN202210465295.4[P]. CN114888780B.发明专利,授权
4. 李秦川,徐灵敏,叶伟,陈正升.一种具有大摆角的两转动一移动冗余驱动并联机构. CN201711326185.5[P]. CN108000495B.发明专利,授权
5. 李秦川,吴震,叶伟.一种结构对称的运动冗余两转一移并联机构: CN202210437818.4[P]. CN114888777B.发明专利,授权
6. 李秦川,赵海辰,张海峰,王梓浩.一种绳驱动超冗余机器人的逆解优选及高精度协同控制系统:CN202410719928.9[P]. CN118578367A.发明专利,受理
7. 李秦川,李杰,张海峰,叶伟,柴馨雪.一种基于图语法的两转一移并联机构设计方法:CN202410502184.5 [P]. CN118269097A.发明专利,受理
8. 李秦川,吴一鸣,史东豪.一种使用IMU和绳牵引相结合的以人体上肢为遥操作主端控制器的遥操作方法:CN202310937024.9 [P]. CN116872209A.发明专利,受理
9. 张海峰,李秦川,赵海辰,周博文,叶伟.一种2R1T并联机器人超螺旋滑模最优迭代学习控制系统:CN202410713843.X [P]. CN118636111A.发明专利,受理
10. 周笑龙,张海峰,李杰,李秦川,谢镇涛.一种基于大尺度场景的智能导盲四足机器人: CN202311763021.4 [P]. CN117841013A.发明专利,受理
联系方式
● 通讯地址:杭州下沙高教园区2号大街928号
● Email: lqchuan@zstu.edu.cn




 师资队伍
师资队伍